




Bentornati alla serie di articoli su come assemblare un drone :)
Nel primo articolo abbiamo visto e descritto tutti i componenti che andremo ad utilizzare per assemblare il drone. In questo episodio invece inizieremo ad assemblare i componenti; assemblaggio che verrà concluso nel terzo articolo.
Il kit che andremo ad utilizzare è l'ARF Kit di DJI, un drone dal diametro di 450mm, ma le nozioni di assemblaggio possono essere applicate facilmente a qualsiasi kit presente in commercio, con i dovuti aggiustamenti.

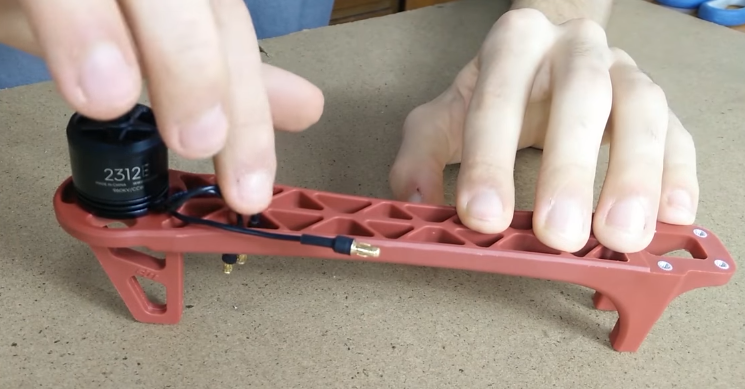
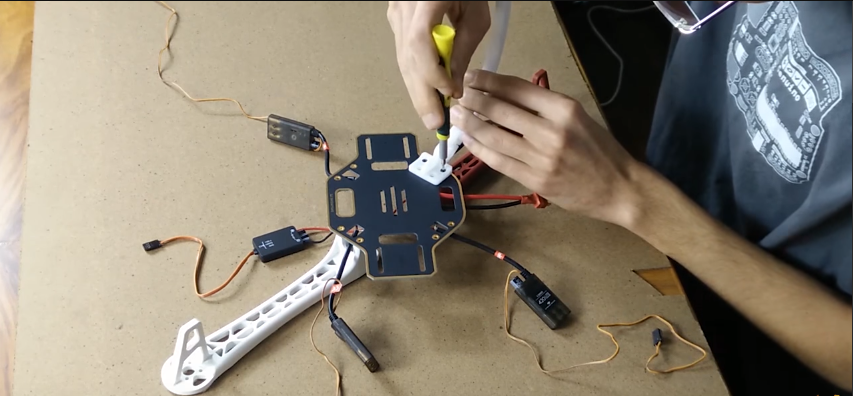
Per iniziare avvitiamo i 4 motori alle 4 braccia orizzontali. Una volta avvitati i motori potremo prendere le misure dei cavi elettrici di collegamento, che andranno tagliati a misura per evitare che siano troppo lunghi oppure troppo corti, causando poi problemi in caso di manutenzione futura.

I DJI 2312E sono motori brushless; hanno bisogno quindi di 3 cavi (fase, neutro e massa) per poter funzionare correttamente.
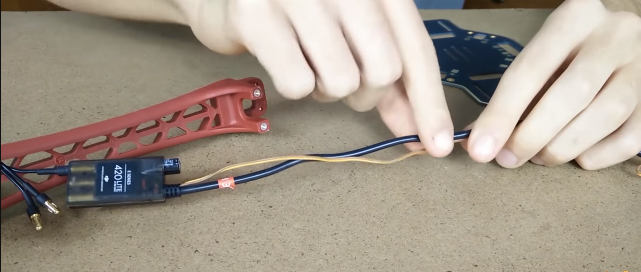
A questi 3 cavi andrà collegato un ESC per ciascun motore.

L'ESC è un componente elettronico che ha la funzione di alimentare il motore e le 3 bobine presenti al suo interno, al contrario dei classici motori a spazzole e carboncini che funzionano per strofinamento interno. Il motore brushless presenta anche molta più coppia rispetto ad un motore a spazzole, cosa che in un drone è da tenere molto in considerazione lato prestazioni e carico massimo trasportabile.
All'ESC andranno collegati 2 ulteriori cavi; uno doppio (positivo+negativo) per alimentarlo, ed un ulteriore cavo di controllo collegato al controllore di volo Naza, che andrà a decidere il regime di rotazione di ciascun motore. Il cavo di alimentazione inoltre è costituito da 2 cavi coassiali tra loro, cosa che eviterà interferenze con la bussola di bordo.
Collegati motori ed Esc ai rispettivi cavi, potremo passare al successivo step del montaggio, ossia la saldatura dei cavi degli Esc alla base di alimentazione comune.
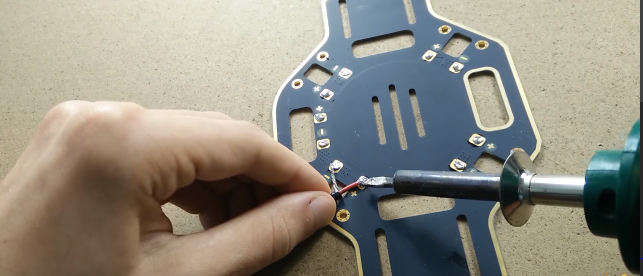
Effettuate le saldature, alla base di alimentazione andrà saldato un ulteriore cavo che permetta di collegarla alla batteria, così da alimentare tutti i componenti.
Assieme al cavo della batteria andrà saldato un ulteriore componente, molto importante: il PMU.
Cos'è il PMU? Sostanzialmente un regolatore di tensione "intelligente", che regolerà la tensione fornita in uscita dalla batteria (solitamente 12V-15V) e la abbasserà per renderla compatibile con il controllore di volo Naza e gli altri componenti.

Finito di saldare tutta la cavetteria di alimentazione, è il momento di passare ad avvitare le 4 braccia e le 4 gambe del drone, così da irrigidire ulteriormente la struttura.
Effettuato anche quest'ultimo step, è arrivato il momento di controllare, ed eventualmente montare se non l'avete fatto in precedenza, i motori.
I motori devono essere montati con attenzione, poichè non sono tutti uguali: due infatti ruoteranno in senso orario e due in senso antiorario, e se non montati correttamente il drone potrebbe non sollevarsi affatto oppure diventare ingovernabile e schiantarsi.

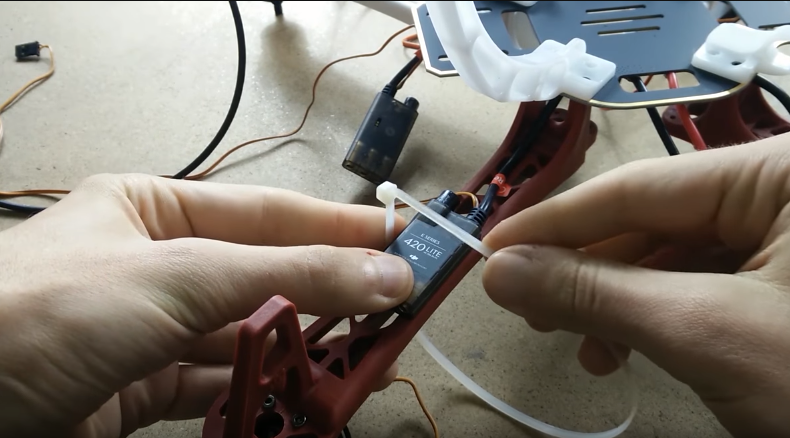
Finito di aver controllato i motori ed il senso di rotazione, passiamo a fissare gli Esc alla struttura.
Per fare ciò conviene usare delle fascette di plastica (quelle comunemente usate dagli elettricisti), in modo da avere un'ottima resistenza alle sollecitazioni e allo stesso tempo poter smontare gli Esc in caso di guasto oppure aggiornamenti futuri.
E con quest'ultima operazione si conclude anche il secondo articolo dedicato all'assemblaggio di un drone.
Nel prossimo articolo/video vedremo come collegare il controllore di volo e tutti i sensori dedicati :) Alla prossima!