




Bentornati alla serie di articoli su come assemblare un drone :)
Nei primi due video abbiamo visto e descritto tutti i componenti utilizzati per assemblare il drone e li abbiamo assemblati per comporre telaio e componenti dedicati al volo (motori, ESC ed eliche).
in questo terzo episodio lasceremo da parte la parte hardware, per dedicarci a quella elettronica dedicata alla parte software, ossia il controllore di volo, il GPS, la bussola, la ricevente del telecomando, il modulo LED delle luci di funzionamento e il modulo dedicato alla connessione USB.
Il controllore di volo che andremo ad utilizzare è il DJI Naza.
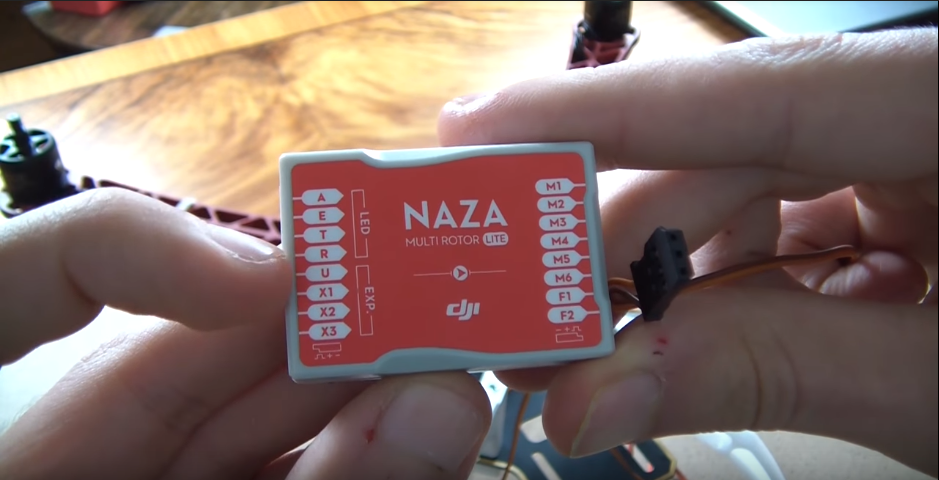
Osservando attentamente il nostro controllore di volo, noteremo nella parte sinistra una massiccia presenza di porte di connessione (precisamente 8 porte verticali e 2 orizzontali). A cosa serviranno mai tutte queste porte? Scopriamolo!
Iniziamo dalla parte più semplice, ossia le 2 porte orizzontali. Nella prima, indicata con la sigla LED, andremo a collegare il modulo LED delle luci di funzionamento; nella seconda invece, indicata con la sigla EXP (Expansion), collegheremo il modulo GPS e la bussola, ed eventualmente un gimbal per la fotocamera, se presente.
Alle 8 porte verticali invece andrà collegata la ricevente del telecomando in nostro possesso.
Attenzione: con il kit DJI F450 è possibile utilizzare 3 differenti tipi di ricevente; di conseguenza la piedinatura della ricevente cambierà a seconda di quale andrete ad utilizzare. Controllate l'applicazione DJI dedicata per controllare la giusta sequenza della piedinatura, in base alla ricevente in vostro possesso.
Nella parte destra invece avremo ulteriori 8 porte: 6 porte contraddistinte dalla sigla M(M1, M2, M3, M4, M5, M6) e 2 porte contraddistinte dalla sigla F (F1 ed F2).

Alle 6 porte di tipo M (nel nostro caso ne utilizzeremo solamente 4) andremo a collegare gli ESC dei 4 motori montati sul nostro drone.
NB: (sono presenti 6 porte perchè la Naza è compatibile anche con gli esacotteri)
Alle 2 porte di tipo F invece andrà collegato il gimbal, se presente.
Partendo dal motore 1 (avanti destra), inizieremo a collegare gli ESC in senso antiorario; di conseguenza avremo: M1=Motore Avanti Destra; M2=Motore Avanti Sinistra; M3=Motore Indietro Sinistra e M4=Motore Indietro Destra.
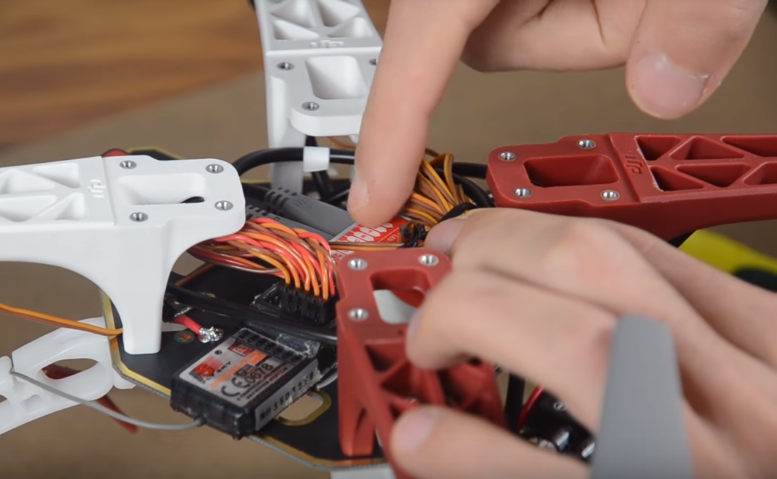
Collegati ESC e ricevente del drone, andremo a collegare il modulo LED alla Naza e successivamente ad incollarlo, usando il biadesivo presente nel kit, in un punto facilmente accessibile, per poter così collegarlo tramite USB al nostro pc e regolare i vari settaggi.
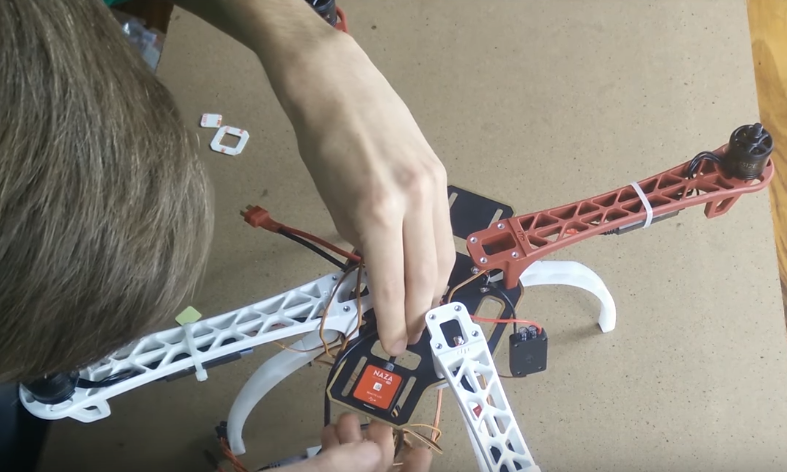
Incollato il modulo LED, andremo a fissare tramite biadesivo anche il controllore Naza e la ricevente del telecomando. Per quanto riguarda la ricevente, non ci sono grossi problemi di posizionamento, basterà stare attenti nel posizionarla esternamente e non piazzarla tra i cavi ammassati, per evitare schermature non volute e quindi portata ridotta del segnale.
Discorso diverso per quanto riguarda il controller Naza: arrivati a questo punto prendete un bel respiro e concentratevi, perchè questo è un momento in cui bisogna dedicare massima attenzione a ciò che stiamo facendo.
Il controller Naza non può essere posizionato a caso, ma ha un punto ben preciso: va posizionato esattamente al centro di massa del drone, ne troppo in basso ne troppo in alto, ed anche perfettamente centrato sulla piastra di sostegno a cui sono stati fissati precedentemente i bracci. Quindi ne a sinistra ne a destra, ma perfettamente al centro, per non incorrere in problemi di bilanciamento dei pesi e quindi evitare rovinose picchiate e cadute.
Inoltre, guardando bene il controllore, noteremo sullo sticker adesivo una piccola freccetta: attenzione, è molto importante! Quella freccetta infatti indica in quale verso va posizionato il controllore, per non fare impazzire i dispositivi inerziali presenti al suo interno (giroscopio, barometro ed accelerometro). La nostra cara freccetta dovrà puntare quindi esattamente sulla parte anteriore del drone.

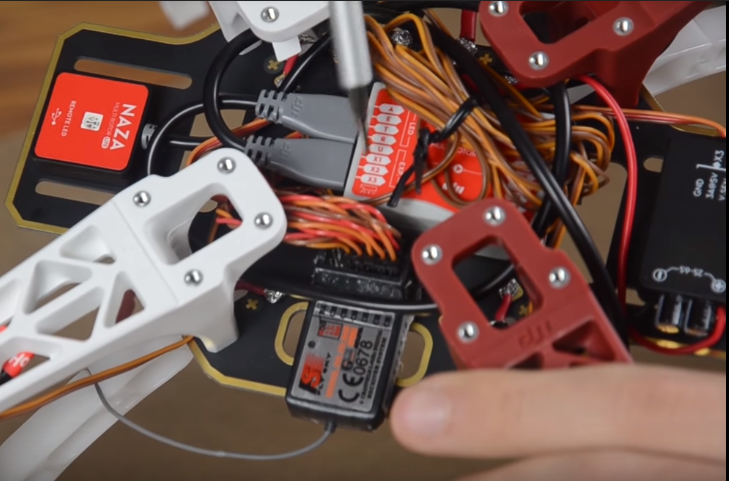
Fissato finalmente il nostro controller, passiamo a dedicarci ai cavi, fissandoli e raccogliendoli per evitare che vengano tranciati accidentalmente dalle eliche e per semplificare lo smontaggio in caso di interventi futuri.
Sistemati anche i cavi, è arrivato il momento di collegare il PMU alla Naza, tramite la porta X3, per andare così ad alimentare controllore di volo, modulo Led e modulo GPS.
Montato anche l'ultimo componente, possiamo passare al fissaggio finale della scocca, utilizzando la piastra gemella di quella utilizzata per montare le braccia, per bloccare la scocca anche nella parte superiore, tramite le viti in dotazione.
Inseriamo anche un velcro, per poter fermare saldamente la batteria, ma allo stesso tempo facilmente apribile per sostituirla al volo nel caso in cui si scarichi.
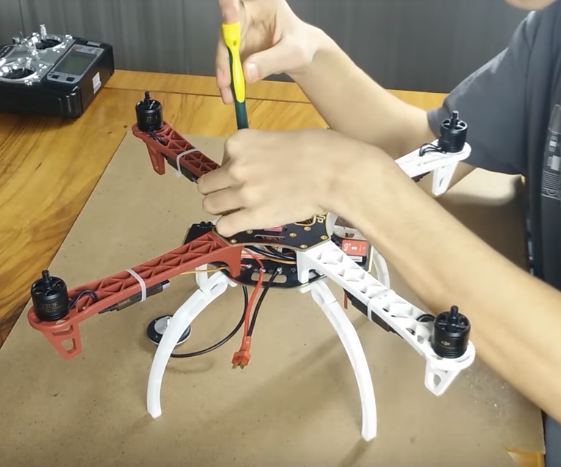
Fissata la piastra, andremo a montare il paletto che andrà a sostenere l'antenna GPS e la bussola.
Attenzione: anche in questo caso controllate bene il verso del modulo; è presente un freccia che indicherà il verso in cui andrà montato il modulo, e deve puntare esattamente verso il davanti del drone, esattamente come per il controllore Naza visto precedentemente.
Effettuata anche quest'ultima regolazione, il drone è ufficialmente finito; si dovrà solamente procedere a regolare i vari settaggi tramite il computer. Ma questo lo vedremo nel prossimo episodio!
Alla prossima puntata!