




Ciao a tutti e bentornati alla serie di articoli su come assemblare un drone :)
Negli scorsi articoli e video abbiamo visto come assemblare un drone; passiamo adesso alla fase successiva, forse la più importante di tutte: la taratura e regolazione software del drone e del controllore di volo Naza.
NB: prestate attenzione, prima di iniziare tutto il processo: i driver per il controllore Naza infatti non sono "firmati" da DJI. Ciò comporterà problemi con Windows, in quanto, non essendo firmati, li reputerà non sicuri e si rifiuterà di installarli.
Niente paura però, a tutto c'è una soluzione! Vediamo come fare :)
Il blocco attuato da Windows sarà facilmente aggirabile facendo partire il sistema operativo in "modalità test", ed installando così il driver manualmente da "Gestione dispositivi".
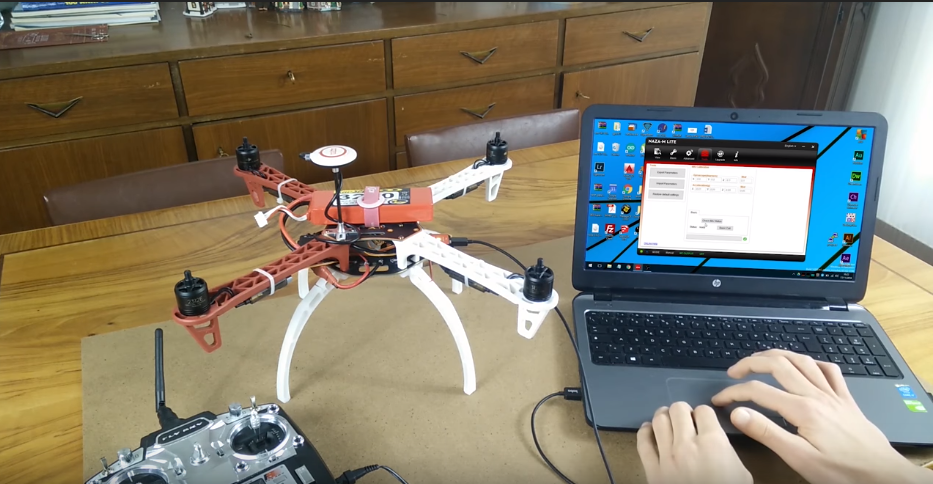
Installato il driver, procediamo a collegare il drone alla presa USB del nostro computer.
Il programma da scaricare dal sito DJI non è unico, ma è diverso per ogni tipo di controllore Naza.
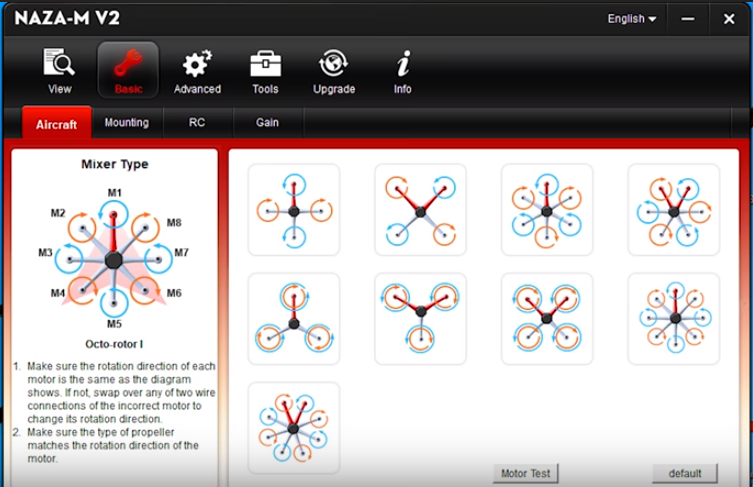
Installato quello corretto e avviato, la prima operazione da effettuare sarà quella di selezionare il tipo di drone che dovremo configurare (ottacottero, esacottero, quadricottero, ecc.), andanndo a selezionarlo nella tab "Aircraft".
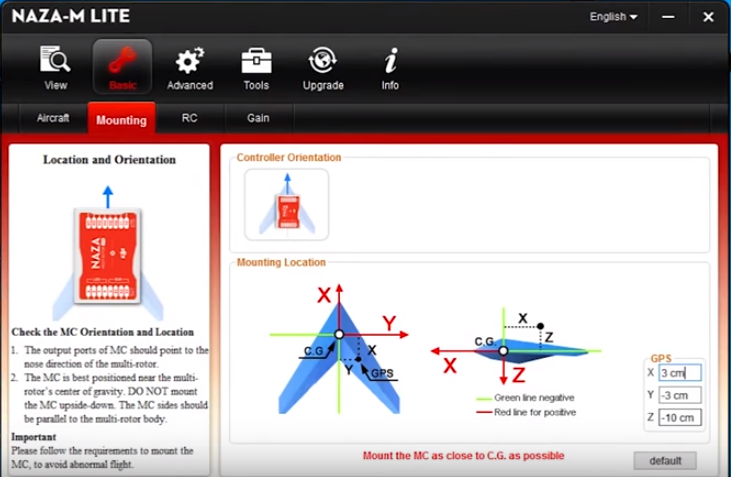
Effettuata la scelta del tipo di drone, rechiamoci adesso nella tab "Mounting" per impostare la distanza del GPS rispetto al centro di massa del drone, cioè il punto dove è stato installato il controllore Naza.
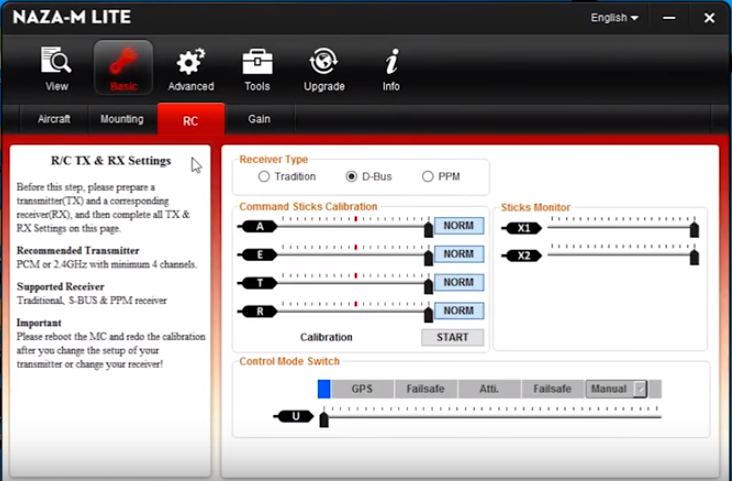
Arriviamo adesso alla parte difficile; la tb "RC", ossia quella dedicata alla configurazione del radiocomando.
Il radiocomando può essere di tre tipi: PWM (ossia il tradizionale radiocomando), PPM oppure D-Bus.
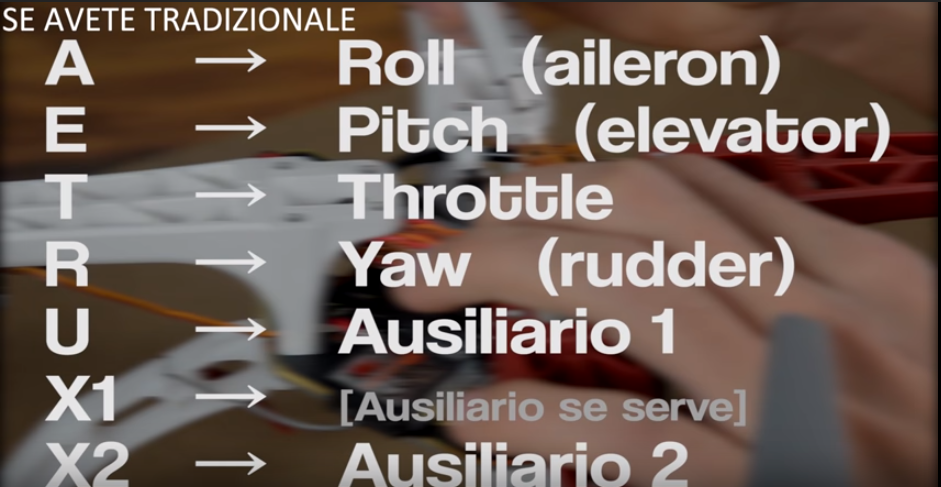
Se il radiocomando è di tipo PWM, i cavi tra ricevente e controllore di volo dovranno essere connessi nel seguente modo:
Se invece, come nel nostro caso, la ricevente e il radiocomando sono di tipo D-Bus, vi basterà connettere il bus dati alla porta X2 del controllore Naza. Tutte le altre porte invece rimarranno libere.
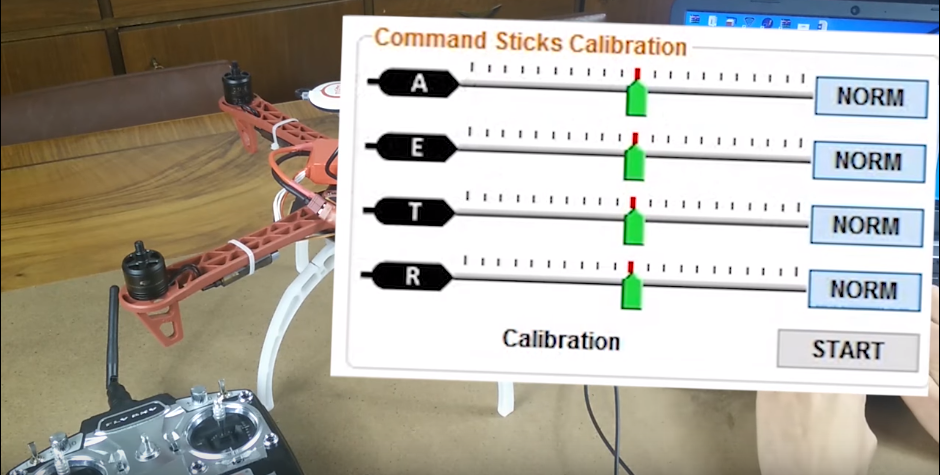
In caso ricevente e radiocomando siano di tipo PWM dovrà essere effettuata anche la calibrazione dei gimbal, muovendo le levette sui due assi cartesiani.
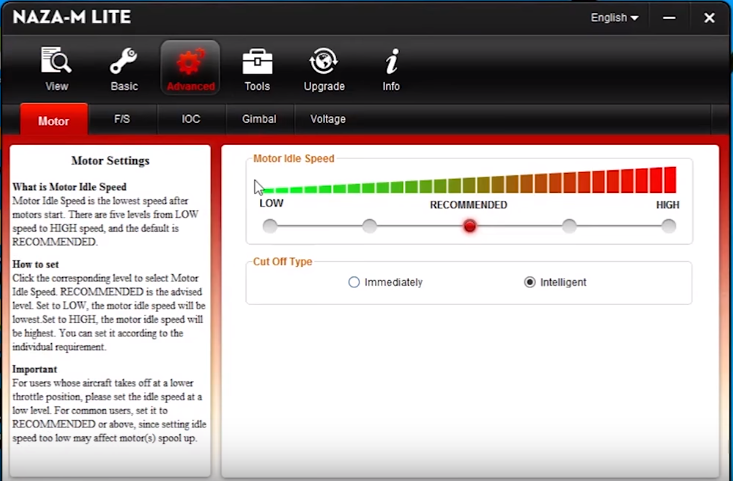
Passiamo adesso alla tab "Advanced".
Nella prima sottotab "Motor" potremo impostare la velocità di rotazione delle eliche mentre il drone è a terra.
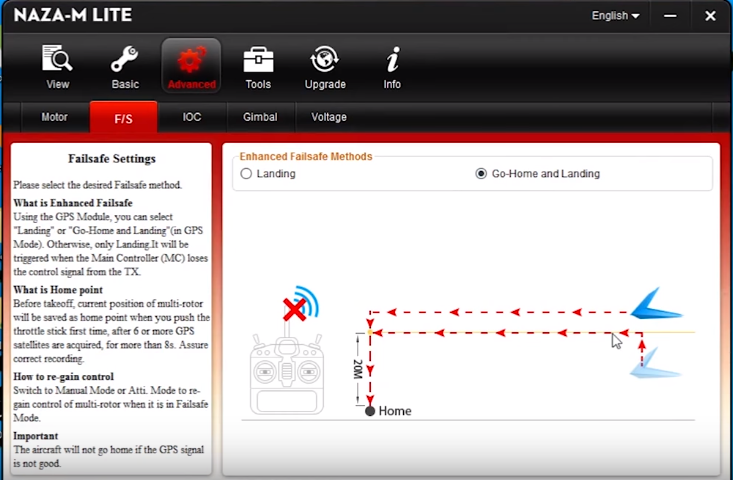
Nella seconda sottotab "F/S", ossia Failsafe, potremo decidere la manovra da far fare al drone nel caso in cui perda il segnale del radiocomando. Potremo quindi farlo ritornare automaticamente al punto di decollo, oppure atterrare in autonomia.
La sottotab "Gimbal" invece serve a configurare i gimbal per fotocamera DJI, ma non avendolo non lo tratteremo.
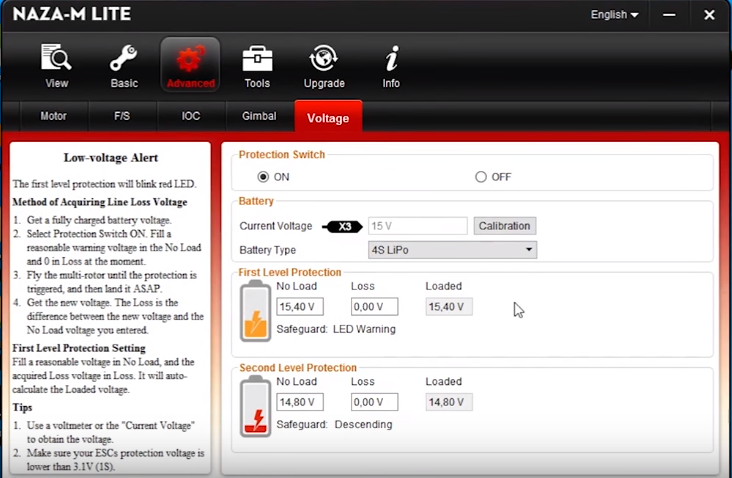
L'ultima sottotab della sezione, ossia "Voltage", è molto importante, poichè potremo inserire un limite di scarica della batteria, superato il quale il drone atterrerà autonomamente per evitare di scaricare la batteria totalmente e danneggiarla, oppure danneggiarsi lui nel caso si schiantasse.
Impostato anche il limite di scarica, passiamo a calibrare la IMU (inertial Measurement Unit), ossia l'insieme di tutti i sensori del drone (accelerometro, giroscopio, bussola, barometro, termometro ecc...) direttamente dalla tab "Tools".
Calibrata anche la IMU, termina così il 4° episodio della serie dedicata ad imparare a costruire e far volare un drone.
Nel prossimo episodio andremo a vedere come calibrare la bussola in esterno e ad effettuare delle prove di volo.
Alla prossima :)